- +1
靠酒精驅(qū)動(dòng),88毫克的微型機(jī)器人可持續(xù)工作2小時(shí)
微型機(jī)器人可以在極為狹小的空間里運(yùn)動(dòng),這是人類和傳統(tǒng)機(jī)器人無法做到的。但由于其體型過小,功率、控制力受限,目前的技術(shù)仍無法使其有效解決社會(huì)問題。
近日,來自南加州大學(xué)的研究人員發(fā)明了一款酒精驅(qū)動(dòng)的微型昆蟲機(jī)器人,在解決微型機(jī)器人能量來源問題上提供了全新思路,朝著研發(fā)完全自主微型機(jī)器人的目標(biāo)邁進(jìn)了重要的一步。

該微型機(jī)器人的名稱為RoBeetle,不同于其他依靠電池或外接電線驅(qū)動(dòng)的微型機(jī)器人,它的能量來源是甲醇。它長15毫米,質(zhì)量只有88毫克(大約相當(dāng)于三粒大米),卻可以拖運(yùn)其自身重量2.6倍的物體。它能夠攜帶95毫克的燃料,燃料最多可以為其供電2個(gè)小時(shí)。
相關(guān)研究《An 88-milligram insect-scale autonomous crawling robot driven by a catalytic artificial muscle》8月19日發(fā)表在《科學(xué)機(jī)器人》上,主要作者為南加州大學(xué)航空航天與機(jī)械工程系助理教授Néstor O. Pérez-Arancibia和博士生Xiufeng Yang、Longlong Chang。
“電池的能量密度非常低,因此我們需要新的能量來源。我們制作的機(jī)器人又輕又小是因?yàn)樗灰揽侩姵毓┠堋!盢éstor O. Pérez-Arancibia在接受New Scientist網(wǎng)站采訪時(shí)表示。
研究人員在論文中稱,大多數(shù)昆蟲的肌肉發(fā)達(dá),這有利于它們進(jìn)行激烈的運(yùn)動(dòng)。同時(shí),它們粗壯的身體有助于以脂肪和糖原的形式儲(chǔ)存能量。受此啟發(fā),研究人員開發(fā)了可靠堅(jiān)固的微型人工肌肉,可以像真實(shí)肌肉一樣收縮和放松。

覆蓋有鉑(Pt)粉的鎳鈦合金線的電子顯微鏡圖像
最值得關(guān)注的是,人工肌肉的能量來源是甲醇。以往微型機(jī)器人通常依靠電池或外接電線驅(qū)動(dòng),前者因?yàn)轶w積限制,其比能量往往很低(低于1.8MJ/kg),而后者則制約機(jī)器人的獨(dú)立性。甲醇在正常大氣壓下以液體形式儲(chǔ)存,能量是小型電池的10倍以上。這意味著利用甲醇驅(qū)動(dòng)的微型機(jī)器人自主性更強(qiáng),同時(shí)可以保持較小的體積。
該動(dòng)力系統(tǒng)中的鎳鈦合金線表面覆蓋有鉑(Pt)粉,可以催化甲醇燃燒。燃燒產(chǎn)生熱量,使位于機(jī)器人腿部的電線縮短。化學(xué)反應(yīng)停止后,電線冷卻,重新延伸,由此驅(qū)動(dòng)RoBeetle運(yùn)動(dòng)。
為了驗(yàn)證在甲醇驅(qū)動(dòng)下機(jī)器人的運(yùn)動(dòng)性能,研究人員進(jìn)行了兩組實(shí)驗(yàn)。
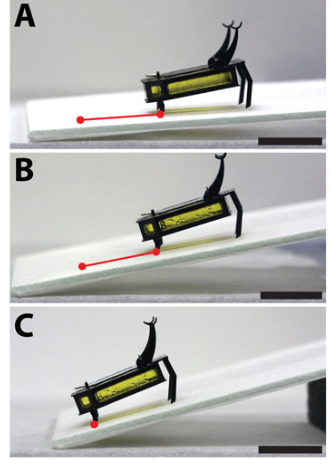
該機(jī)器人能輕松爬上傾斜角為5°和10°的斜坡,但在傾斜角度升至15°時(shí)失敗了
在爬坡實(shí)驗(yàn)中,研究人員在傾斜的載玻片上放上了一張表面光滑的紙巾,然后調(diào)整斜面傾斜角度測試RoBeetle的爬坡能力。該機(jī)器人能輕松爬上傾斜角為5°和10°的斜坡,但在傾斜角度升至15°時(shí)失敗了。此外,因?yàn)橐簯B(tài)甲醇具有粘性,傾斜角度對(duì)其在儲(chǔ)存箱里的分布可以忽略不計(jì)。
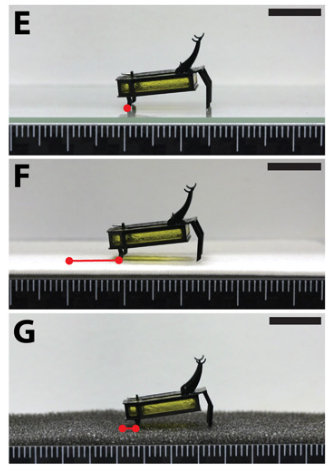
RoBeetle在粗糙程度不同表面上的爬行能力
在第二組實(shí)驗(yàn)中,研究人員測試了RoBeetle在粗糙程度不同表面上的爬行能力。結(jié)果顯示,機(jī)器人可以在紙巾、泡沫表面爬行,但無法在光滑的玻璃表面爬行。同時(shí),研究人員進(jìn)一步探究了RoBeetle的載物運(yùn)輸能力,發(fā)現(xiàn)它可以拖運(yùn)其自身重量2.6倍的物體。
研究人員在論文中表示,RoBeetle的動(dòng)力設(shè)計(jì)可作為范例,用于研發(fā)能夠在水陸空運(yùn)動(dòng)的自主微型機(jī)器人。
Pérez-Arancibia表示,他們研制出的甲醇驅(qū)動(dòng)人工肌肉作為該領(lǐng)域的重大突破,將使他們研發(fā)出第一個(gè)完全自動(dòng)的微型飛行機(jī)器人。他們的下一步計(jì)劃是研究在RoBeetle工作時(shí)如何為其添加燃料,從而使機(jī)器人可以長時(shí)間持續(xù)工作。
此外,研究人員計(jì)劃對(duì)RoBeetle進(jìn)行編程,使操作者能與它進(jìn)行交互。如果成功了,RoBeetle將可以充當(dāng)人工授粉器,或者協(xié)助醫(yī)生進(jìn)行復(fù)雜的手術(shù)。
不過,在同期的評(píng)論文章中,美國麻省理工學(xué)院計(jì)算機(jī)科學(xué)與人工智能實(shí)驗(yàn)室博士后研究員Ryan L. Truby和哈佛大學(xué)工程與應(yīng)用科學(xué)學(xué)院博士后研究員李曙光認(rèn)為:“雖然RoBeetle是一個(gè)令人興奮的微機(jī)器人里程碑,但仍有改進(jìn)空間。”
評(píng)論指出,RoBeetle 的運(yùn)動(dòng)速度只有0.76 mm/s,比其它微機(jī)器人小得多。同時(shí),該機(jī)器人只能向前運(yùn)動(dòng),人們無法控制其轉(zhuǎn)向和速度。此外,研究人員放棄了傳統(tǒng)的電子控制器,這使機(jī)器人的功能升級(jí)更為困難,并且限制了外部控制與交互。



- 報(bào)料熱線: 021-962866
- 報(bào)料郵箱: news@thepaper.cn
滬公網(wǎng)安備31010602000299號(hào)
互聯(lián)網(wǎng)新聞信息服務(wù)許可證:31120170006
增值電信業(yè)務(wù)經(jīng)營許可證:滬B2-2017116
? 2014-2025 上海東方報(bào)業(yè)有限公司