- +1
交通設施|為什么要發展無人駕駛車輛
2004年3月,美國舉辦了第一屆無人駕駛比賽,即業內大名鼎鼎的DARPA大獎賽。2004年的比賽場地選在沙漠地區,希望避開行人和居住區的干擾。不過,即便在這樣相對理想的駕駛環境下,仍然沒有一輛車完成賽程。但這次比賽激起了業內、高校極大的熱情。比賽結束當天,組委會就宣布,18個月后再次比賽,獎金也從原先的100萬美元增加到200萬美元。
2005年10月,比賽繼續。最終有五個車隊分別獨立完成212公里的賽程。斯坦福大學獲得第一名,卡內基梅隆大學獲得第二名。時隔兩年,2007年11月舉辦了第三屆DARPA大獎賽,以城市地區為主題,最終有六支隊伍完成比賽,獲得了獎金。


面向無人駕駛的DARPA大獎賽雖然只舉辦了三屆,但被公認為無人駕駛的里程碑事件。甚至有些人認為,這是現代無人駕駛技術的起點,與傳統無人駕駛技術進行了區隔。大學和廠商的結合,大幅推動了一些技術的發展,甚至還從中誕生了新技術——這些技術在今天的媒體上常被提到,譬如人工智能、機器視覺、深度學習、高清地圖,等等。
為什么要發展無人駕駛車輛?
DARPA大獎賽使無人駕駛車輛成為公眾談論的話題。其中有一個問題需要認真回答:為什么要發展無人駕駛車輛,到底有什么好處呢?
這是很實在的社會問題,也是商業問題,需要有清晰的答案,幫助無人駕駛車輛可持續發展,避免產生不切實際的期望。
這幾年,這個問題得到了準確的回答,一些最初的誤區也得以理清。
很多人認為,無人駕駛技術一旦成熟,會像現在的汽車一樣進入尋常家庭。其實,如果仔細測算下無人駕駛的成本,這樣的模式不會是其技術成熟后的主要商業模式。達到全自動的無人駕駛車輛,應該不會在你我的采購清單里,至少在看得見的未來是如此。
這幾年來,業界已形成共識。無人駕駛車輛分為兩大塊,一塊是傳統車輛組成的包(vehicle package),而另一塊是自動駕駛包(autonomous package)。傳統的車輛也許只要一二十萬元人民幣,但如果加上自動駕駛包,成本會飆升數倍,甚至達到上百萬。除此以外,自動駕駛包里的精密儀器需要經常保養和調校。對連機油都不會加、輪胎不會換的私家車主來講,無人駕駛汽車日常的保養和調校費用恐怕無力承擔,也不劃算。
因此,全自動的無人駕駛車輛,其應用對象并不是私家車主,而是通常說的商用營運車輛。譬如物流公司、出租車公司等。近幾年,在運輸領域飛速發展的“出行即服務”(MaaS)及共享汽車概念,已經逐步落地。對商用營運車輛來講,無人駕駛可以節省人工成本,足以攤銷自動駕駛包帶來的成本。這也是共享汽車企業,如Uber、Lyft,投入巨資研發無人駕駛車輛的原因。
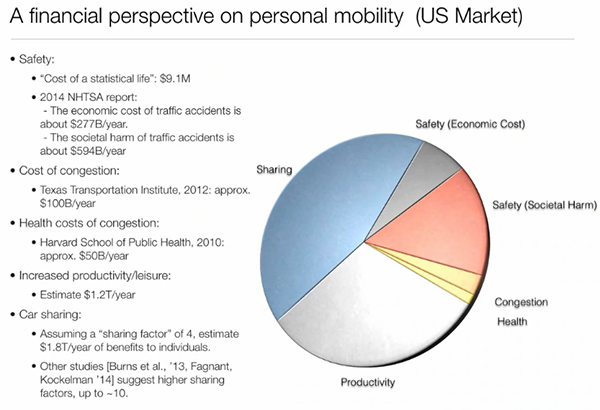
而關于無人駕駛車輛的好處,Dr. Emilio Frazzoli給出了一串數據,以證明無人駕駛車輛將在安全、減少擁堵、改善健康、提高生產力、共享汽車五個方面帶來巨大好處。這些數據是以美國市場為例,每年能帶來的效益或市場大致如下:
?安全會有8710億美元的效益;
?減少擁堵大約有1000億美元;
?改善健康大約有500億美元;
?提高生產力大約有12000億美元;
?汽車共享達到了驚人的18000億美元。
這些數據足以回答為什么發展無人駕駛車輛的問題。雖然人們也有不同看法,但大多仍然贊同其結論,只是對其安全考量有異議。在一些研究者看來,其帶來的事故效益及對社會的貢獻,足以成為投資的理由,但提高生產力和共享汽車的效益,不能完全確定。
無人駕駛的分類:輔助駕駛和自動駕駛
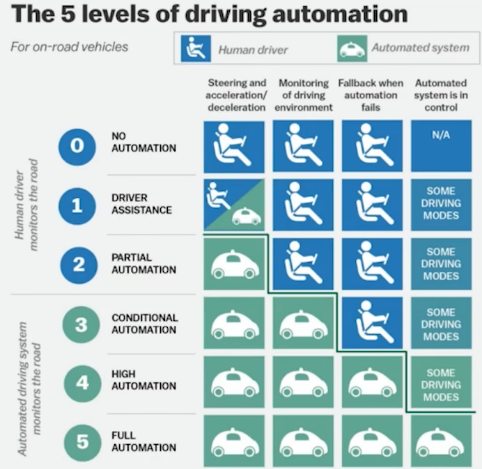
2013年,為推動無人駕駛車輛發展,美國道路交通安全管理局(NHTSA)為無人駕駛給出了分級方式,一共分為六級,L0-L5。不過,這樣的分類被國際汽車工程師聯合會(SAE)認為不專業。SAE在2014年推出了仍是L0-L5六級的更為專業的分類表,NHTSA于2016年接受了一分類法。這個分類法在2018年更新到了第三版——SAE J3016-2018。無人駕駛汽車企業在介紹自己的產品時,一般都會引用SAE的分類表來為產品定位。
很多國內報道里,經常會出現國際汽車工程師聯合會(SAE)的分類表,卻標為美國道路交通安全管理局(NHTSA),偶爾會被業內笑話。

注:由于技術仍在發展,業界未有共識,本文不區分無人駕駛的一些名詞,如無人駕駛、自動駕駛,也不區分Autonomous Cars、Driverless Cars、Self Driving Cars等名詞。
不過,有個區別很重要,就是不同分級代表的司機責任問題。在這張分類表里,L0-L1是純粹的人工駕駛,意味著司機對駕駛負全責;L2-L3是機器輔助人工駕駛的車輛,仍是司機對駕駛負全主責,但有機器輔助,機器會承擔一部分責任,一般稱這個級別為輔助駕駛;L4-L5是自動駕駛,司機不用負責駕駛,而由車輛自行駕駛。L4和L5的區別是區域的區別,L4為有限范圍,譬如只在一些省市里,而L5則不限區域,全球通用。
目前市面上商用能達到的最高級別都沒有超過L3,至多幫助司機做些諸如跟車行駛、自動泊車的工作。稍有復雜的環境,輔助駕駛就難以控制車輛,必須由司機來接管。畢竟出了事故,機器不會承擔責任。
對普通人而言,如果搞不清輔助駕駛和自動駕駛的區別,只要記住這些責任區別就可以了。
也有媒體報道,輔助駕駛和自動駕駛的區別在于外部環境的支撐。沒法做到自動駕駛,是因為沒有智能網聯或智能運輸系統支撐,如果有支撐,就能做到自動駕駛。
其實,這是一種誤區。無論用什么樣的外部支撐,輔助駕駛都無法達到自動駕駛級別,L3到L4是個門檻,能否跨越這個門檻取決于車輛本身。自動駕駛的含義在于,獨立完成各種場景下的行駛,獨立是指沒有任何外部助力。
這和人類司機駕駛車輛一樣,領了駕駛證的司機,應該能自己一個人開車,需要教練的司機是不合格的司機。后面會介紹智能網聯或智能運輸系統與無人駕駛車輛的關系。
發展無人駕駛汽車的不同路徑
這幾年,全世界發展無人駕駛汽車的廠商很多,也形成了不同發展路徑。目前的發展路徑大致可歸為兩類。
一類是從L0到L1,再到L2。雖然有些車輛也會被納入無人駕駛車輛,但實質上是輔助駕駛車輛,利用輔助駕駛設備給司機提供建議,或在簡單環境下實現明確的操作。
另一類是直接切入L4全自動駕駛階段,在這個階段逐步成熟。全自動駕駛的車輛是指那些乘客只要輸入目的地,就自動帶你到目的地的車輛。
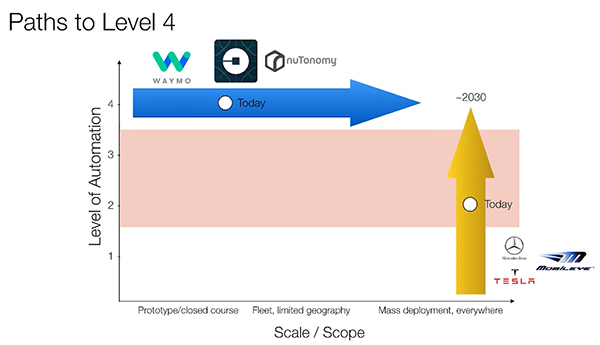
這兩條發展路徑和商業模式有關,也和初始投入有關。藍箭頭的路徑,其投入更大,需要的時間長,成本高,期間并無收入。而黃箭頭的路徑,則邊賣邊研發,成本壓力輕許多,也是現在汽車廠商喜歡的模式。不過,黃箭頭的發展路徑可能會面臨難以越過L4這個級別的障礙,停留在L2-L3層面。
截止目前,這兩類不同的發展路徑,都出現了足夠證明其可行性的實例。用兩個指標判斷,一個是行駛里程數,另一個是同時投放車輛數,幾家領先企業都已過了公認的及格線。
輔助駕駛車輛,以特斯拉為例,行駛里程數已超過10億公里,從深度學習技術的角度看,積累的數據相當豐富,投放的車輛數也達到了50萬輛,早已過了1萬輛的門檻。
而自動駕駛車輛,以谷歌相關的Waymo為例,行駛里程數已過1千萬公里的門檻,也有計劃要投放超過2萬輛。而同為L4自動駕駛級別的Uber,追趕速度非常快,很快就要越過這些門檻。
因此,目前看來,這個行業的前景比較樂觀,可以繼續向前測試或商用。
而對看熱鬧的普通人來講,可以通過上面兩個指標來了解實際能力。對監管部門來講,要比普通人多些觀察方式,譬如要求各家企業及時上報遇到的情況或意外,以觀察產品的能力。無人駕駛車輛的事先監管難以做到,路上可能出現的場景過多,難以一一檢測,連主要場景也很難覆蓋,只能把監管放在事中或事后了。
因此,無人駕駛車輛是否合格,并不能通過鑒定會或試驗場得出結論。監管部門至多在邀請專家評測實地測試后,發個要求有限的測試資格,至于是否合格,只能套用俗話,是騾子是馬,拉出來溜溜,才能慢慢看清。如果在試驗場都會發生意外,或跑不完全程,這樣的無人駕駛車輛面臨的挑戰確實很大。
以上這些過程,仍有許多技術和法律上的細節,需要好好琢磨。
無人駕駛車輛如何了解路上的交通?
李飛飛在TED上講過,怎么教計算機理解圖片。其實這是無人駕駛車輛如何看懂道路和交通的一種方式。
計算機通過對標注過的照片進行大量學習,大致了解每種物體的含義,并理解這些物體之間的關系,這是人工智能的深度學習技術的大致做法。為什么要有1千萬公里的里程數和投放1萬輛這樣的指標,就是與訓練機器理解需要的場景數量有關。達不到這樣的指標,就無法訓練出基本及格的機器。
但是,道路上的場景、關系要比照片豐富得多。車輛除了要理解,還要做決策。譬如,在行人眾多的斑馬線前,人類司機會邊等待邊慢慢往前推進,形成與行人的相互博弈,但無人駕駛對這樣的博弈缺乏足夠的算法。在無序的環島也是如此,如果無人駕駛缺乏足夠的博弈能力,會長期等待,給環島添亂。
算法是理解的關鍵。這是目前所有企業都面臨的瓶頸。企業間的差距也主要在算法上。


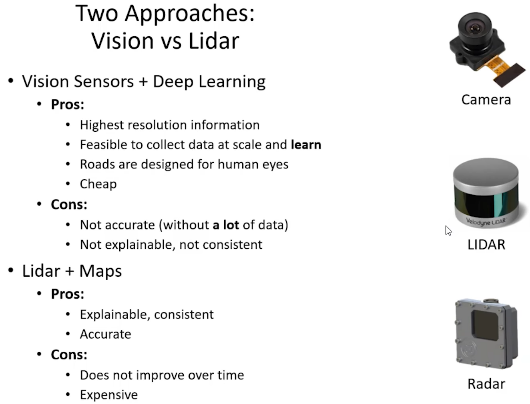
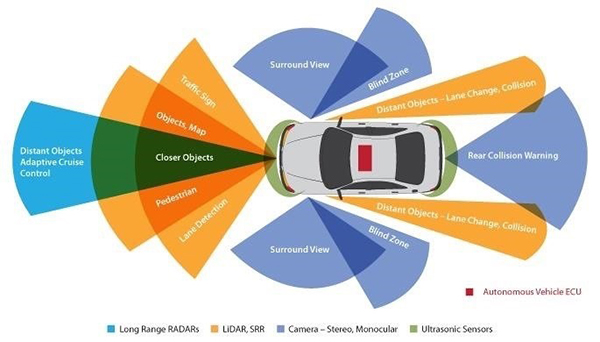
算法和信息輸入有關,也就是如何獲得信息,而輔助駕駛和自動駕駛有很大區別。輔助駕駛采用的是視覺設備+深度學習為主體的組合方式,以較低的投入獲取最大的效益,但存在不精確和受環境約束大的缺點。而自動駕駛采用Lidar+自動駕駛地圖為主,視覺輔助+深度學習輔助的方式,來獲取高精度和全天候的能力,不過缺點是太貴,也太難維護。從搭載的設備看,輔助駕駛信息獲得的數量和能力要明顯弱于自動駕駛車輛的設備。因此,獲得信息的設備是制約輔助駕駛車輛跨越L3到L4之間的鴻溝,跨越會異常艱難。
當然,許多公司推出的無人駕駛車輛,搭載了自動駕駛信息獲取設備,卻只能做輔助駕駛的事兒,這應該是算法不過關造成的。
無人駕駛車輛和網聯車、協同ITS是什么關系?
和無人駕駛車輛一樣,網聯車(Connected Cars)、協同智能運輸系統(Cooperative Intelligent Transport Systems,C-ITS)和出行即服務(Mobility as a Service,MaaS)也在迅猛發展。媒體經常會混淆這些概念,以為是無人駕駛車輛的組成部分。其實,這些技術并不相同,建設主體不同,應用目的也不相同。
不過,未來這些技術會密切結合在一起,改變整個運輸系統,也改變城市的運營方式。在此簡單介紹下它們之間的關系。
無論在哪級,無人駕駛車輛都存在盲區,這和人開車一樣。Lidar用鐳射光立體掃描周邊環境來形成實時地圖,360度全景立體的地圖,把障礙物一個不漏地放進自動駕駛地圖里,這是比人類開車有優勢的地方。但是,和人眼一樣,鐳射光會被物體遮擋而看不見,就有了盲區,比如看不見建筑物后的車輛,也看不見車輛背后的行人。
而協同智能運輸系統的技術,是將各種先進交通系統得到的交通數據整合。協同就是跨平臺整理信息,分析數據,得出更全面的結論,譬如將信號燈的數據、幾公里以遠的交通情況、道路施工情況、事故情況、周邊的服務設施和服務能力,將諸如超視距、超能力(超能力指能預知前方是否會擁堵,靠交通控制系統來預測并告知自動駕駛車輛)的信息整合起來,告訴路上需要的車輛。
這些工具在無縫銜接后,將看得更多更遠,而無人駕駛車輛的豈不是倍增了?
小結
雖然業內比較看好無人駕駛車輛的未來,但是,即便樂觀的觀察者也只能提出輔助駕駛明確的時間表,很難確定自動駕駛的時間表。道路上的場景過于豐富,使用者之間的意圖和關系也很難用算法描述,不同地區之間的文化背景和交通規則差異也很大,這些都成為無人駕駛車輛發展的制約因素。
不過,即便未來并不那么確定,技術投入仍然是值得的,在自動駕駛技術的發展過程中,形成的各項成果足以讓事故能一點點降下來,讓社會效率一點點升上去。這個過程,也是偉大的過程。
(本文部分內容可能存在技術上的爭議或錯漏,望見諒,歡迎共同探討。)



- 報料熱線: 021-962866
- 報料郵箱: news@thepaper.cn
互聯網新聞信息服務許可證:31120170006
增值電信業務經營許可證:滬B2-2017116
? 2014-2025 上海東方報業有限公司