- +1
Science Advances | 具有神經形態觸覺感應的仿生假手
醫工學人評論
創新性地結合混合剛柔結構與多層神經形態觸覺傳感,顯著提升了假手的抓取靈活性與觸覺感知能力,為智能假肢和仿生機器人發展奠定了重要基礎。
3月5日,美國約翰霍普金斯大學(JHU)的研究人員在《科學·進展》期刊發表文章 “A natural biomimetic prosthetic hand with neuromorphic tactile sensing for precise and compliant grasping”,受人類手指啟發,該研究提出了一種天然的假肢手,結合了軟體機器人的柔順性和剛性機器人的強度,并嵌入了三層神經形態觸覺傳感系統,以模擬人類手部的感知和抓取能力。
創新性:采用剛性內骨骼+軟體關節的混合結構,獨立驅動的軟體關節提高了假手的靈活性,使其能夠適應多種抓握任務;三層觸覺傳感器,分別模擬Merkel 細胞、Meissner 小體、Ruffini 末端和 Pacinian 小體,實現對不同類型的觸覺刺激(壓力、振動、變形等)的感知;傳感層的層次化設計,使假手能夠區分不同物體表面紋理,例如粗糙、光滑、軟硬等特性;假手在紋理識別測試中達到了98.38%的準確率,優于傳統剛性假手(83.02%)和軟體假手(82.31%)。
局限性:觸覺傳感器僅限于指尖,手掌和手指的其他部分沒有嵌入傳感系統,導致假手對整體抓取力和物體形狀的感知不足;盡管混合結構提高了假手的抓取能力,但仍無法達到人手的精細力控水平,特別是在高強度握力任務(如開瓶蓋、提重物)中表現有限;沒有提供閉環反饋,用戶在使用時無法獲得觸覺回饋,仍需依賴視覺進行抓取調整。
臨床應用潛力:適用于上肢截肢患者,特別是需要更精細手部操作的患者(如抓握易碎物品、執行日常生活任務);適用于手部損傷患者的康復訓練,通過觸覺反饋提高神經可塑性,幫助患者恢復感覺;可用于機器人手,執行需要精細觸覺感知的任務。
*評論內容僅供參考,一切以英文原文為準

想象一下,當你伸出手去握住一個蘋果,指尖輕柔地觸碰到光滑的果皮,掌心感受到蘋果的重量,微調抓握力道,防止果實滑落。這些看似簡單的動作,對普通人而言是日常小事,但對于上肢截肢者或假肢佩戴者來說,卻是一個巨大的挑戰。傳統的假手往往是剛硬的機械結構,缺乏真正的觸覺感知能力,使用者只能依靠視覺判斷如何抓握物體,難以精準控制力度。然而,一項最新的研究正在改變這一現狀——JHU的科研人員開發出了一款具有神經形態觸覺傳感的仿生假手,不僅能“感覺”物體的表面紋理,還能像人類手一樣兼顧柔順性與抓取力,大幅提升假手的智能性和實用性。
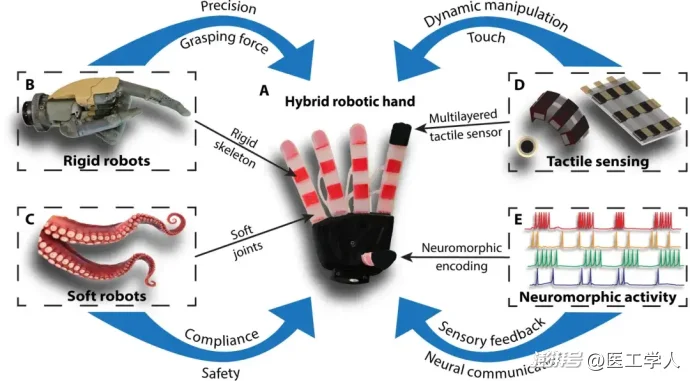
圖1 人手啟發的具有神經形態觸覺傳感的混合機械手。
(A) 以人手為模型,仿生手結合了剛性和柔性假手的優點,同時增加了觸覺傳感和神經形態能力,可在非結構化環境中安全、靈巧地縱物體。(B) 剛性手,例如傳統的假肢,提供精確和更高的抓取力,而 (C) 軟手在與物體交互時提供柔韌性和安全性。(D) 觸覺傳感對于動態縱物體并與之交互是必要的。仿生指尖包含靈活的多層觸覺感應,其靈感來自人類皮膚中的機械感受器。(E) 神經通信有效地向大腦發送大量空間和時間感覺信息。仿生手通過神經形態編碼觸覺傳感信息來模擬神經的動態神經活動。
過去的假肢技術通常面臨一個兩難選擇——剛性結構提供強大抓握力,卻缺乏靈活性;軟體結構則富有適應性,卻難以施加足夠的握力。因此,研究人員決定融合剛性與軟性材料的優勢,打造一種全新的混合假手。
他們設計的假手采用剛性內骨骼和軟性關節相結合的結構,手指由3D打印的聚乳酸(PLA)材料組成骨架,而關節則由Dragon Skin 10 硅膠制造,具備一定的變形能力。這一結構的好處在于,剛性部分提供抓握力和穩定性,軟性部分增強了手指的柔順性,使其能適應不同形狀和材質的物體。實驗表明,相較于完全軟體的假手,這種混合結構的假手不僅抓取力提升了三倍,而且在施加相同壓力的情況下,能夠提供更穩定的抓握控制。
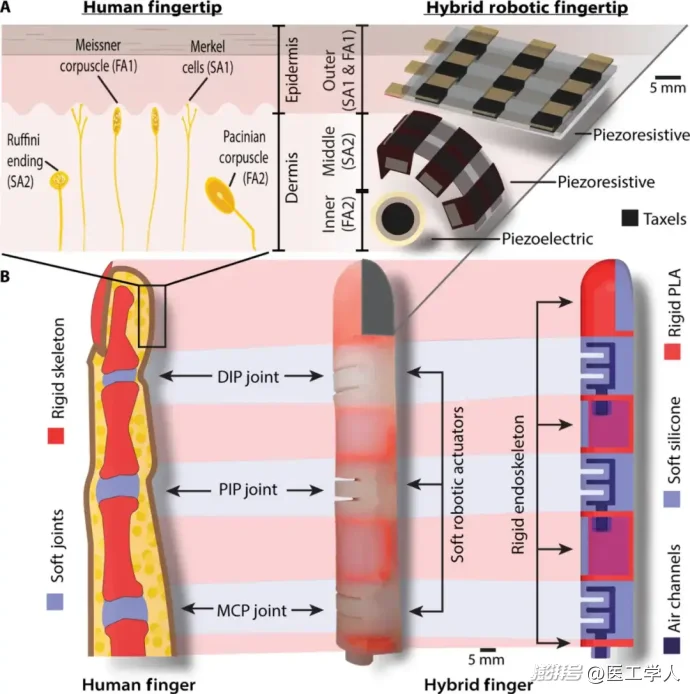
圖2 具有多層神經形態觸覺感應的仿生手指
如果說混合結構提升了假手的“肌肉”,那么仿生觸覺傳感系統則賦予它“神經”。人類手指的觸覺來源于皮膚中的四種主要機械感受器——Merkel 細胞、Meissner 小體、Ruffini 末端和 Pacinian 小體,它們分別負責感知壓力、低頻振動、皮膚拉伸和高頻震動。而這款假手的指尖,正是模擬了人類的這套精妙系統,內置了三層觸覺傳感器:
外層傳感器(表皮層):模仿 Merkel 細胞和 Meissner 小體,利用壓阻式(piezoresistive)材料感知輕觸和表面紋理。
中層傳感器(真皮層):模仿 Ruffini 末端,采用壓電式(piezoelectric)材料,檢測假手在抓取過程中皮膚的形變和剪切力,幫助識別物體的柔軟度。
內層傳感器(深層真皮):模仿 Pacinian 小體,采用壓電式(piezoelectric)材料,能對高頻震動和瞬時壓力做出快速反應,例如識別粗糙表面的微小震動。
通過這套仿生傳感系統,假手能夠像人類手一樣,在握持不同物體時調整施力,并區分物體的表面紋理,為假肢佩戴者帶來了更真實的觸覺體驗。
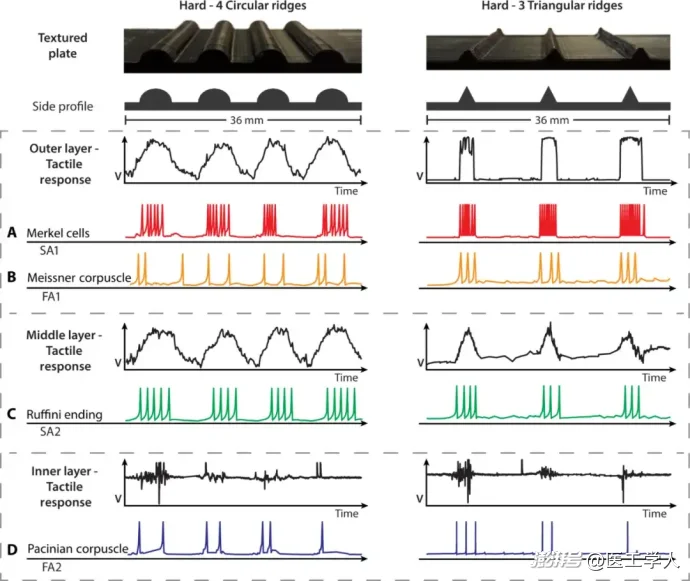
圖3 傳感層的神經形態反應
收集到觸覺信號后,如何讓假手“理解”這些信息呢?傳統的假肢往往采用簡單的模擬信號處理,而研究人員引入了一種更先進的方式——神經形態編碼(Neuromorphic Encoding)。這種方法借鑒了人類神經系統的信號傳遞機制,通過Izhikevich 神經元模型,將傳感器獲取的觸覺數據轉換為脈沖信號(spike train),類似于生物神經元在處理外界刺激時的方式。
這一方法有兩個顯著優勢:
減少計算負擔:脈沖信號只在環境變化時觸發,不需要持續傳輸大量數據,從而降低假手的能耗。
提高觸覺識別精度:假手不僅能檢測靜態壓力,還能分析時間序列中的動態變化,例如感知表面粗糙度或檢測滑動趨勢。
實驗結果顯示,基于這一神經形態編碼系統,該假手在26種不同表面紋理的識別測試中,準確率高達98.38%,遠超傳統剛性假手(83.02%)和軟體假手(82.31%)。此外,在日常物品識別實驗中,假手成功區分了15種不同物品,分類準確率達到99.69%,顯示出強大的環境適應能力。
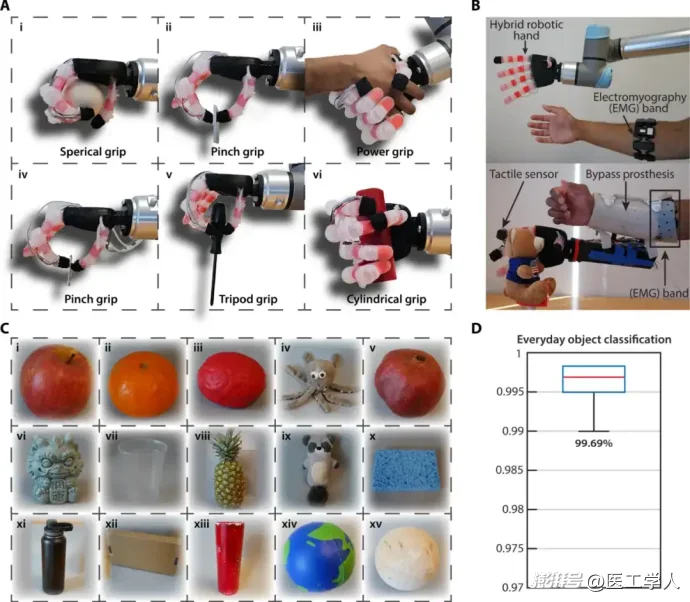
圖4 仿生手抓取和識別物體功能
這項研究不僅是一次學術上的突破,也為假肢技術的未來發展指明了方向。隨著該技術的成熟,在臨床和工業領域的應用前景廣闊:
1.智能假肢:結合肌電(EMG)控制,讓假肢佩戴者能夠通過意念或肌肉信號控制假手,同時獲得實時觸覺反饋,大幅提升假肢的實用性。
2.康復訓練:為手部神經損傷患者提供真實觸覺反饋,幫助他們重新建立手部感覺和運動控制能力。
3.機器人應用:用于手術機器人、智能機械手臂、人機交互設備,提高機器人在復雜環境中的操作能力。
然而,目前的技術仍有一些局限性,例如假手的最大抓取力仍不及人手(僅為1.8N,而人手平均可達32±14N),并且觸覺傳感器尚未覆蓋整個手掌,在某些應用場景下可能存在不足。因此,未來研究仍需優化材料和結構,提高抓取力,并結合閉環神經反饋技術,使假手真正具備“觸覺感知”能力。
本文為澎湃號作者或機構在澎湃新聞上傳并發布,僅代表該作者或機構觀點,不代表澎湃新聞的觀點或立場,澎湃新聞僅提供信息發布平臺。申請澎湃號請用電腦訪問http://renzheng.thepaper.cn。



- 報料熱線: 021-962866
- 報料郵箱: news@thepaper.cn
互聯網新聞信息服務許可證:31120170006
增值電信業務經營許可證:滬B2-2017116
? 2014-2025 上海東方報業有限公司