- +1
eLight|關注泰坦號悲劇,偏振光學實現全天候水下定位
▍郭宸孜、蔡淼

今年6月,泰坦號觀光艇失聯,五名富豪乘客葬身海底,這也讓水域分析、水下定位與水下救援成為全球關注的話題。
近日,來自美國伊利諾伊大學香檳分校(UIUC)的Viktor Gruev教授與David Forsyth教授團隊合作,提出了一種基于偏振光學的水下定位方案,首次實現了全天候的水下地理定位。該文章以“Polarization-Based Underwater Geolocalization with Deep Learning”為題發表在卓越行動計劃高起點新刊eLight。
該工作通過偏振光學成像追蹤太陽位置,以確定水下位置,同時基于上千萬張偏振敏感的全球真實水域圖片進行深度學習訓練,首次實現了在公海、清水或是低能見度水域等不同環境下的全天候水下定位。作者認為,一旦確定了水下地理位置,人類就有望利用該信息進行自主水下導航,更深入的理解水下世界。對于該重大突破,UIUC聯合EurekAlert、ScienMag、Tech Xplore等多家媒體聯合發布了工作解析視頻。
地球水域是一個高度復雜的動態環境,對人類的生存與發展具有極其重要的意義。然而,對水域的現場監測仍然面臨著諸多挑戰。水下采樣機器人為準確的監測效果,但主要挑戰之一來源于水下地理定位技術的缺乏,因為我們熟知的GPS導航信號無法穿透水面,盡管聲學導航可以為水下定位提供一定方案,但其僅能在非常有限的覆蓋范圍內工作,而且精度較差。
據此,受“許多動物通過感知天空或水中的偏振敏感信息以幫助其遷徙”這一自然現象啟發,很久之前,研究人員們就提出,從水下觀看時,天空中的偏振模式在清澈淺水中的斯涅耳窗(Snell window)內是可見的,或許可用于地理定位和導航。然而,很長時間內,研究人員都認為水下光主要是水平偏振的,因此不適合地理定位,直到20世紀后才發現并不正確。在2018年,本文作者Gruev教授在清水域中使用偏振成像實現了精度為1970公里的水下地理定位,文章發表于Science Advances。
但是,在夜間或是在全球廣泛存在的低能見度渾水域中,仍舊無法實現水下地理定位。這來自于兩大主要挑戰:1)渾水中的偏振被認為是水平的;2)沒有夜間水下偏振模式的觀測記錄。因此,如果能夠實現復雜水域(渾水和夜間水域)的水下地理定位,無疑對全球水域研究具有極其重要的意義和現實價值。
在散射系數較低(0.001 m?1)的開闊海域或低營養淡水中,水下偏振模式可以通過單一散射模型準確表示,但對于散射系數較高的水域、夜間水域,基于散射模型的水下地理定位方法就變得不可行。在本研究中,研究團隊表明了低能見度水域中的日光以及高能見度和低能見度水域中的夜光產生的偏振模式可以實現準確的地理定位。
首先,研究團隊使用能夠記錄全球四個地點的徑向偏振光場的水下攝像機收集了約1000萬張實際圖像,組成了用于訓練的數據集。然后,該團隊訓練了一個深度神經網絡,根據全向鏡頭收集的水下偏振角 (AoP) 圖像,結合相機位置傳感器數據來預測地理位置(圖一)。研究團隊采用了RI-ResNet(rotation-invariant ResNet)深度神經網絡結構,并加入了RDM架構(recurrent denoising module),使得該方案能夠建立起水下偏振模式的時空聯系。研究團隊將該模型與參數驅動模型進行了跨時間、日期以及不同能見度水域下的水下地理定位精度的全方位比較(圖三)。結果顯示,使用偏振信息而不是僅強度圖像可以在較為復雜的水域中實現優越的地理定位精度(圖四,圖五)。
這一研究成果為水下地理定位技術的進一步發展開辟了更廣闊的研究前景,同時也為全球范圍內的水域研究提供了一種新的有效途徑,對后續其他相關領域的研究具有極其重要的價值。
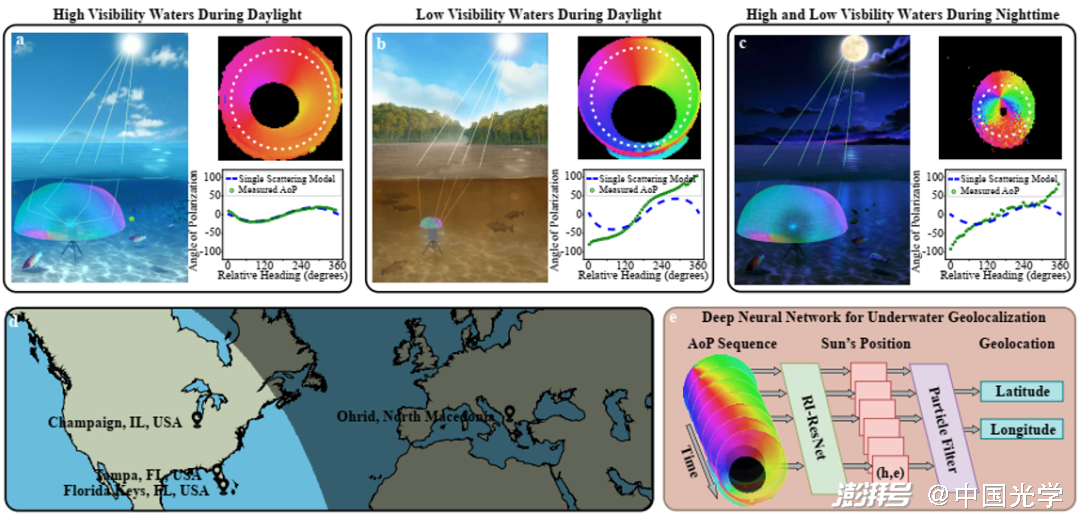
圖一:白天和夜間,低能見度和高能見度水域中,基于天基水下偏振信息的深度神經網絡水下地理定位方法。 (a)-(c) 我們在高能見度和低能見度水域部署了帶有全向鏡頭的水下偏振敏感成像系統,以收集所需的數據。每張圖旁邊都顯示了測量的偏振角 (AoP,angle of polarization) 的偽彩色圖像以及將觀察到的AoP與參數模型預測進行比較的圖表。可以看出參數模型的預測在低能見度水域中不可靠,并且在夜間無效。(d) 我們選擇了全球地圖上所示的四個不同地點來收集水下數據并評估我們地理定位方法的有效性。(e) 我們的深度神經網絡與粒子濾波器結合使用AoP圖像序列來估計相機的位置緯度和經度。

圖二:(a)水下偏振模式主要是由光在空氣-水界面之間的折射和水介質內的散射產生的。這些模式可以使用穆勒矩陣(Mueller matrices)進行數學建模。(b) 粒子濾波器 (PF, particle filter) 通道以紅色顯示高概率粒子,以藍色顯示低概率粒子。(c,d) 我們提出的網絡模型包括RI-ResNet(rotation-invariant ResNet) 架構,該架構用RI卷積層對應地替換每個卷積層,并考慮全向圖像中的徑向空間結構。(e) RDM(recurrent denoising module)架構涉及一個雙向循環網絡,用于對圖像之間的時間依賴性進行建模。
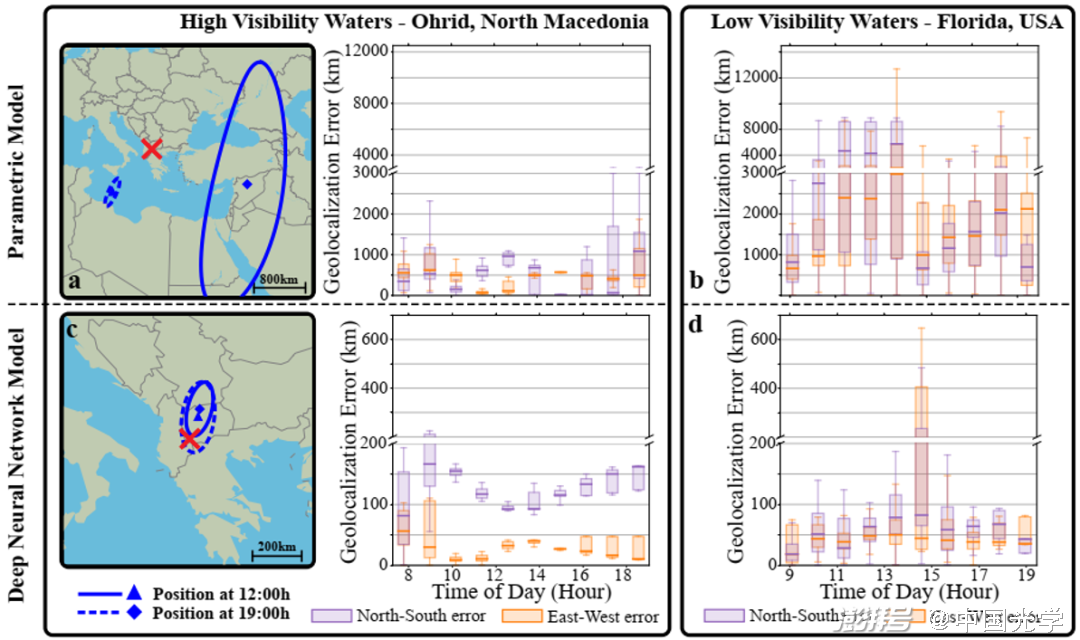
圖三:在低能見度和高能見度水域進行全天時的地理定位。頂行((a)和(b))和底行((c)和(d))分別顯示了使用參數模型和深度神經網絡模型的地理定位精度,左列和右列分別表示了高能見度和低能見度水域。由于參數模型在納入導致水下偏振的所有物理因素的建模上存在缺陷,因此基于參數的水下地理定位在低能見度水域中的精度為中等到低。相比之下,深度神經網絡地理定位在高能見度和低能見度水域全天都表現良好。各個地圖分別顯示中午和一天結束時地理位置的粒子濾波器估計的協方差的平均值(三角形和菱形)和第一標準偏差(實線和虛線)。箱線圖代表南北(紫色)和東西(橙色)地理定位預測誤差的中位數和上/下四分位數。
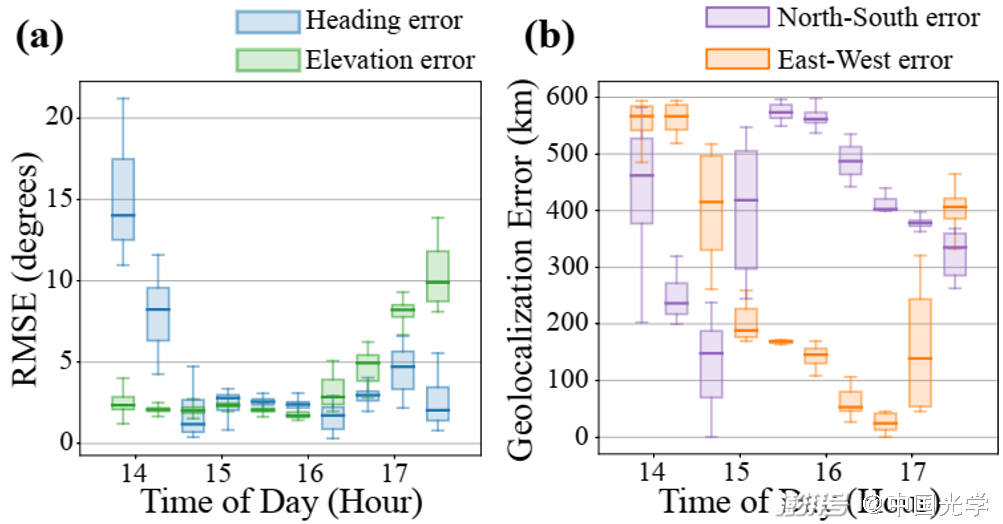
圖四:北馬其頓奧赫里德湖50 m深度的水下地理定位數據。50 m深度處,幾個小時內得到的(a)太陽角誤差和(b)地理定位誤差。

圖五:不同月相下夜間的地理定位精度。 (a) 全球地圖顯示新月和滿月階段四個站點(十字符號)地理位置的粒子濾波器估計的平均值(由菱形表示)和第一標準差(由實線表示)。(b) 箱線圖表示南北(紫色)和東西(橙色)地理定位預測誤差的中位數和上/下四分位數。
| 論文信息 |
Bai, X., Liang, Z., Zhu, Z., et al. Polarization-based underwater geolocalization with deep learning.eLight 3, 15 (2023).
本文為澎湃號作者或機構在澎湃新聞上傳并發布,僅代表該作者或機構觀點,不代表澎湃新聞的觀點或立場,澎湃新聞僅提供信息發布平臺。申請澎湃號請用電腦訪問http://renzheng.thepaper.cn。



- 報料熱線: 021-962866
- 報料郵箱: news@thepaper.cn
互聯網新聞信息服務許可證:31120170006
增值電信業務經營許可證:滬B2-2017116
? 2014-2025 上海東方報業有限公司