- +1
觀察|動力電池回收,“不能靠一根撬棍撬天下”,智能拆解是方向
“回收不能靠一根撬棍去撬天下,撬開所有的電池包。”在4月2日舉辦的中國電動汽車百人會論壇的動力電池分論壇中,國內電池回收企業龍頭格林美股份有限公司(002340,一下簡稱“格林美”)的副總經理張宇平表示。
在張宇平看來,借助人工智能、物聯網、大數據等信息技術,使動力電池回收從目前的人工拆解、機械化拆解到自動化、智能化拆解轉變,是動力電池回收利用行業轉型升級和高質量發展的必由之路。
“一根撬棍”拆動力電池的情況挺常見
實際上,隨著新能源汽車行業的快速發展,以動力電池5—8年的使用壽命計算,退役動力電池的數量正逐年增加。據中國汽車工程學會的數據顯示,在全球范圍內,到2025年,全球的退役動力電池將達到104萬噸,2030年將達到350萬噸。
電池回收在我國儼然已經成為了香餑餑。天眼查數據顯示,目前,經營范圍包括“電池回收”的企業,目前全國有超過7.3萬家,其中2022年成立的約有3.6萬家。截至2023年2月底,全國現有與擬新建的廢鋰離子動力電池回收處理企業共145家,規劃建設廢動力電池處理產能987.5萬噸,環評批復產能469.2萬噸。
由于退役電池的電池包品牌型號的多樣性,退役狀態的不確定性等因素,當前拆解大多以人工操作為主。然而,人工拆解存在著諸多問題。“從拆解的過程來講,電池包電壓較高,存在觸電風險;電池模組較重,重復搬運容易造成人力疲勞;電池包內部線束、匯流排錯綜復雜,存在短路風險;電池包內部常用膠固定,主要靠蠻力拆解。”張宇平說。

何為蠻力拆解?近日國內媒體《晚點》的一篇報道中,一個生動的蠻力拆解畫面是這樣的,“兩名男性工人直接手持切割機在汽車底盤上割出縫隙,再把長短不一的鐵棍插入裂縫撬開更大裂口,最后徒手拿出電芯。”而由于汽車底盤密封性很好,“工人雙手交叉伏在撬棍上,用盡全力跳起,再以全身重量下壓撬棍,連續跳躍半個小時,才能將鐵皮完全撬開。
而在一些小企業中,工人們用螺絲刀將電池外殼撬開,傾倒電解液等電池材料,電解液的成分是六氟磷酸鋰等,人接觸過量氟化物會導致關節痛和骨痛。
張宇平說,“從人口紅利來看,未來也不太會有年輕人去從事這種低端、危險的工作。”
然而,動力電池拆解由人工向智能轉換并不容易。據張宇平介紹,目前國內有5000多種動力電池包,動力電池包品種繁多,結構復雜,連接形式多樣,設計準則不統一,更新換代快,使得智能拆解有很多難度。
不僅如此,目前的動力電池結構設計向CTP,CTC,CTB轉變,其中CTP技術是減少或去除電池模組,直接將電芯、電池殼整合掛到車身底盤中,CTC、CTB則是直接將電池和底盤/車身融合在一起,制造成本進一步降低,同時更好地優化車輛空間和提高續航表現。
但問題是, 在這種技術趨勢下,電池包外殼、模組、電芯之間可能用到大量的膠,除膠會是頭等難題。例如,此前,美國著名的拆車團隊桑迪·穆勒拆解了一輛特斯拉model Y的4680電池包,拆解團隊花了兩周時間,才把電池包上的上蓋卸下來,又花了一周的時間,使用干冰噴射器,才取出電芯。團隊發現,4680電池包整體采用了灌膠的方式,用大量的聚氨酯膠水,對電芯和零部件進行固定。

動用干冰噴射器

撬開匯流排
據介紹,目前電池包的除膠工藝中,物理方案安全性更高,可控性強,污染小,但投入過大,需要大型設備輔助拆除。化學方法除膠更徹底,但會使用大量有機試劑,產生廢氣廢液,且存在一定安全隱患。這是未來需要行業破解的難題。
智能拆解一個動力電池包,總共分幾步?
未來,如果要用機器替代人工,做到廢舊動力電池的智能化、柔性化拆解,需要哪些步驟,又存在哪些難題呢?
張宇平認為,第一步要建立數據采集系統,用3D相機獲取RGB圖、深度圖和云數據,拆解同時錄入拆解工藝信息,3D重建技術得到電池包數模。
第二步,使用多機器人協同拆解上蓋螺釘。配置兩臺機器人進行上蓋螺釘協同拆卸作業,機械手配置一套局部高精度3D視覺識別系統,對外殼螺釘進行定位識別,由視覺識別系統的引導下,實現對上蓋螺釘的智能拆卸。
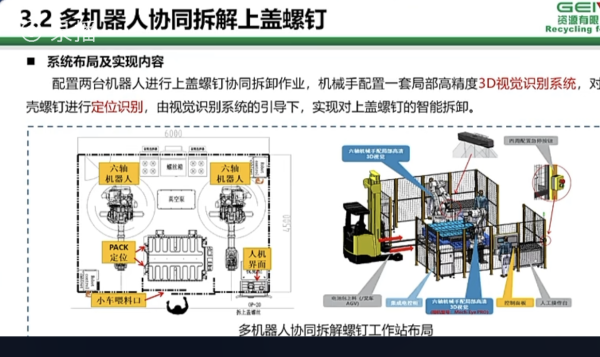
不過,這一步會有很多的技術難點。張宇平介紹說,“汽車在運行很多年后,電池上蓋螺釘可能會發生變形、銹蝕和位移,這就需要對非標螺釘的拆解動作開發閉環的柔性控制策略,拆解螺絲過程中的力矩、位姿角度能夠動態調整。
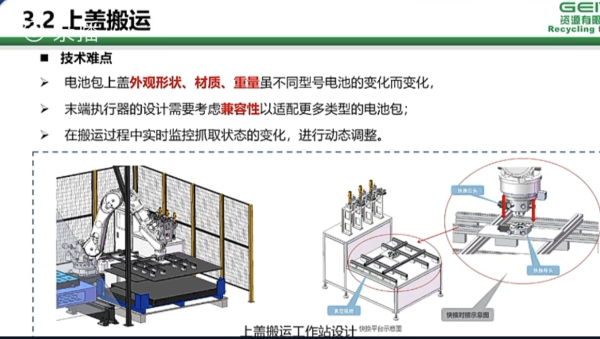
第三步,是進行上蓋搬運。這一步的技術難點包括,電池包上蓋外觀形狀、材質、重量隨不同型號電池的變化,“例如上蓋的材質有鋼、鋁制、碳纖維等,上蓋的形狀完全不規整”。這就需要末端執行器的設計考慮兼容性以適配更多類型的電池包,在搬運過程中實時監控抓取狀態的變化,進行動態調整。
第四步,是進行電池模組搬運。通常而言,在模組中,電芯有各種各樣的排布,包括冷卻系統和電氣系統的連接,這就需要重點考慮基于視覺引導的機器人的無序抓取問題,根據電池模組的大小、輪廓形態、重量開發柔順控制策略,自適應調整夾爪的尺寸、夾持點位。在抓取的過程中,根據抓力點的變化,判斷抓取的狀態,及時調整抓取態勢。

第五步,是拆解產品智能分揀。電池模組里有很多組件,除了電芯,還包括繼電器、熔斷器、匯流排、線束,怎么讓機器人快速進行識別、抓取、分選,也有很多難度。
此外,由于拆解產物規格型號、形狀尺寸存在較大差異,甚至堆疊,需要實現基于3D視覺的在線檢測、識別、定位。拆解產物在輸送線上保持持續運動狀態,需實現動態目標智能分揀。根據拆解產物的大小、輪廓形態開發柔順控制策略,自適應調整機器人位姿、夾持點位和夾持力。
最后一步,是進行模組、電芯的銑削。這其中,需要克服銑削用電主軸和工業機器人之間的兼容性,保證銑刀的進給深度和重復位移的精度不受銑削電芯時銑削力的影響。
如何打造一個數字化電池回收利用工廠
“動力電池回收不是簡單的事情。”張宇平坦言,為此,格林美正在打造數字化回收利用工廠。其中重點是建立拆解核心數據庫,包括電池特征數據庫和拆解工藝知識庫,對于原始數據需要進行知識關聯和知識融合,生成知識圖譜,在此基礎上實現知識檢索和知識推理,并不斷積累進化。

“如何有效地設計并使用這兩個數據庫,是實現智能化拆解的關鍵技術之一,目前這兩個數據庫尚未形成標準,現有的也多以指導人工拆解為主。”張宇平說。
其次,是要實現人機協同和多機協同。人機協同和多機器人協同既具備人類認知能力,又具備機器人的高效率,同時提升了安全性和便捷性。多品種、小批量的動力電池電池包拆解具有高度的動態復雜性,采用多機協同技術能夠極大提高拆解效率和降低成本,帶來更高的經濟效益。
再次,是要開發柔順拆解系統。實現機器人軌跡動態規劃,自適應實現快速的狀態和路徑切換,開發動力電池多維動態識別、全局定位、精定位,深度學習目標檢測算法開發。拆解動作的柔性控制系統開發,各子系統按照拆解工藝,有序獲取當前系統狀態并執行正確的任務。柔性末端執行器、模塊化快換結構設計開發,針對不同拆解對象和工藝,開發適配的末端執行器,如柔性電批、伺服變距夾爪、柔性吸盤等。
近年來,工信部會同有關部門發布實施了《新能源汽車動力蓄電池回收利用管理暫行辦法》、《新能源汽車動力蓄電池梯次利用管理辦法》等政策,強化動力電池全生命周期溯源監測,實施廢舊動力電池綜合利用行業規范管理。
就在去年,工信部進一步表示,將加快研究制定新能源汽車動力蓄電池回收利用管理辦法,加大退役電池柔性拆解、高效再生利用等關鍵技術攻關和推廣。
“未來,不是說動力電池產業鏈的所有參與者都去做回收,專業的事交給專業的人來做,但電池回收確實需要產業上下游的協同,只有這樣才能實現國家所倡導的綠色制造的目標。”張宇平說。



- 報料熱線: 021-962866
- 報料郵箱: news@thepaper.cn
互聯網新聞信息服務許可證:31120170006
增值電信業務經營許可證:滬B2-2017116
? 2014-2025 上海東方報業有限公司