- +1
大視場全息AR顯示:錐形全息光學元件
撰稿 | 望舒
近期,元宇宙(名詞解釋>)概念的興起,極大的推進了增強現實(AR)和虛擬現實(VR)技術的發展。為了進一步提升 AR 顯示中用戶與現實場景交互的 3D 沉浸式體驗,解決輻輳和調節沖突以及視疲勞等問題,人們引入了全息顯示(名詞解釋>)技術,該技術可以完整的重建出3D物體的波前信息,獲得雙眼視差(名詞解釋>)和連續運動視差(名詞解釋>),被認為是理想的 3D 顯示技術之一。
然而,目前常見的全息 3D 顯示所用的全息圖都是平面的,如圖 1 所示,用戶只有在全息圖正前方才能觀察到完整的 3D 再現像,其他角度的視場都是受限的,甚至從全息圖側面、頂部、底部和正后方完全無法觀察到全息再現像。這種限制源自于全息圖的形狀,在傳統的平面全息圖中是難以避免的。雖然有不少研究者提出了柱面全息圖和球面全息圖來克服這種限制,但是由于加載全息圖的關鍵器件空間光調制器(名詞解釋>)難以實現非平面的結構,因此很難與柱面和球面全息圖的理論達成共鳴,從根本上解決平面全息圖的局限性。從實用的角度出發,如何在平面全息圖的基礎上實現大視場全息 3D 顯示,成為了全息 AR 顯示中最核心的問題之一。

圖1:平面全息圖的可視區域范圍
基于此問題,日本大阪產業技術研究所 Yusuke Sando 和日本宇都宮大學光學研究中心的 Daisuke Barada 等人設計了一種錐形結構的全息光學元件(HOE)(名詞解釋>),并對它重構出的大角度發散球面波質量和光譜反射率都進行了研究。
他們介紹了這種錐形 HOE 的制作過程,并詳細說明了基于費馬原理的全息圖計算方法,同時,他們利用錐形 HOE 透明的光學特性,通過全息 3D 再現像和現實場景的虛實融合實驗,實現了大視場全息 AR 顯示效果,其水平視角達到了 140°,垂直視角達到了 30°。
近期,該成果以 “Holographic augmented reality display with conical holographic optical element for wide viewing zone” 為題在線發表在Light: Advanced Manufacturing。
論文主要分為四部分內容:錐形 HOE 的光學性能研究、基于錐形 HOE 的大視場全息 AR 顯示原理和實驗、錐形 HOE 的制作以及基于費馬原理(名詞解釋>)的全息圖計算方法。
錐形HOE的光學性能研究
作者們首先研究了錐形 HOE 將垂直入射的平面波轉換為向外發散的大角度球面波的原理和過程,如下圖 2 所示,其中紅色箭頭代表入射的平面波,綠色箭頭代表出射的發散球面波。球面波的最大發散角是由 HOE 記錄過程時使用的物鏡數值孔徑(NA) (名詞解釋>)所決定的。經測量,設計的錐形 HOE 在仰角 θ 從 40° 到 80° 的范圍內都能檢測到發散球面波。

圖2:錐形HOE的光學特性
此外,作者們還測量了他們設計出的錐形HOE的衍射效率和波長選擇性。其中, HOE 的衍射效率和仰角 θ 有很強的相關性,在 θ 為 60° 的時候達到峰值。在這個峰值的條件下,他們測量了該 HOE 的光譜反射率,得到了在 532 nm 波長附近的尖峰,帶寬約為 11 nm,剛好對應了錐形 HOE 記錄時所使用的光波長。以上這些測量結果對他們實現大視場全息 AR 顯示提供了必要的參考。
基于錐形HOE的大視場全息AR顯示原理和實驗
基于這種錐形 HOE,他們設計了一種大視場全息 AR 顯示方法,其原理如下圖3所示,激光通過透鏡1形成準直光束,經計算全息圖(CGH)調制后通過透鏡 2,再經過反射鏡反射后在透鏡 2 的傅里葉平面上濾除掉雜散光,然后垂直入射到錐形 HOE 表面,從而以較大反射角反射到觀察者眼中。如果基于錐形 HOE 的來設計和計算全息圖,觀察者就可以看到在錐形 HOE 內部重建的虛擬圖像。

圖3:基于錐形HOE的大視場全息AR顯示系統
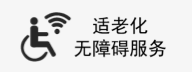
為了驗證這種方法的可行性,如圖 4 所示,作者們以線框立方體作為被記錄物體計算全息圖,以一個插在黏土里的螺釘作為現實場景,設計了一組大視場全息顯示和現實場景虛實融合的光學實驗。他們從不同的角度捕捉全息 3D 再現像,驗證了大視場全息 AR 顯示效果,如圖 5 所示,隨著觀察角度的變化,全息再現像也發生了適當的變化。經過測量,該系統的水平視角達到了 140°,垂直視角達到了 30°。
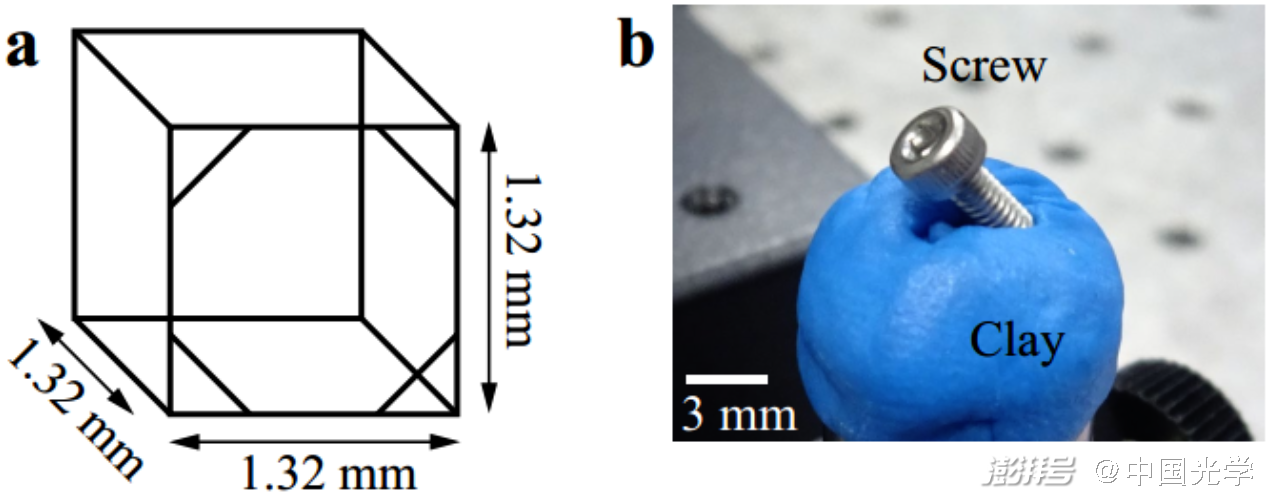
圖4 所使用的虛擬3D物體和現實場景物體
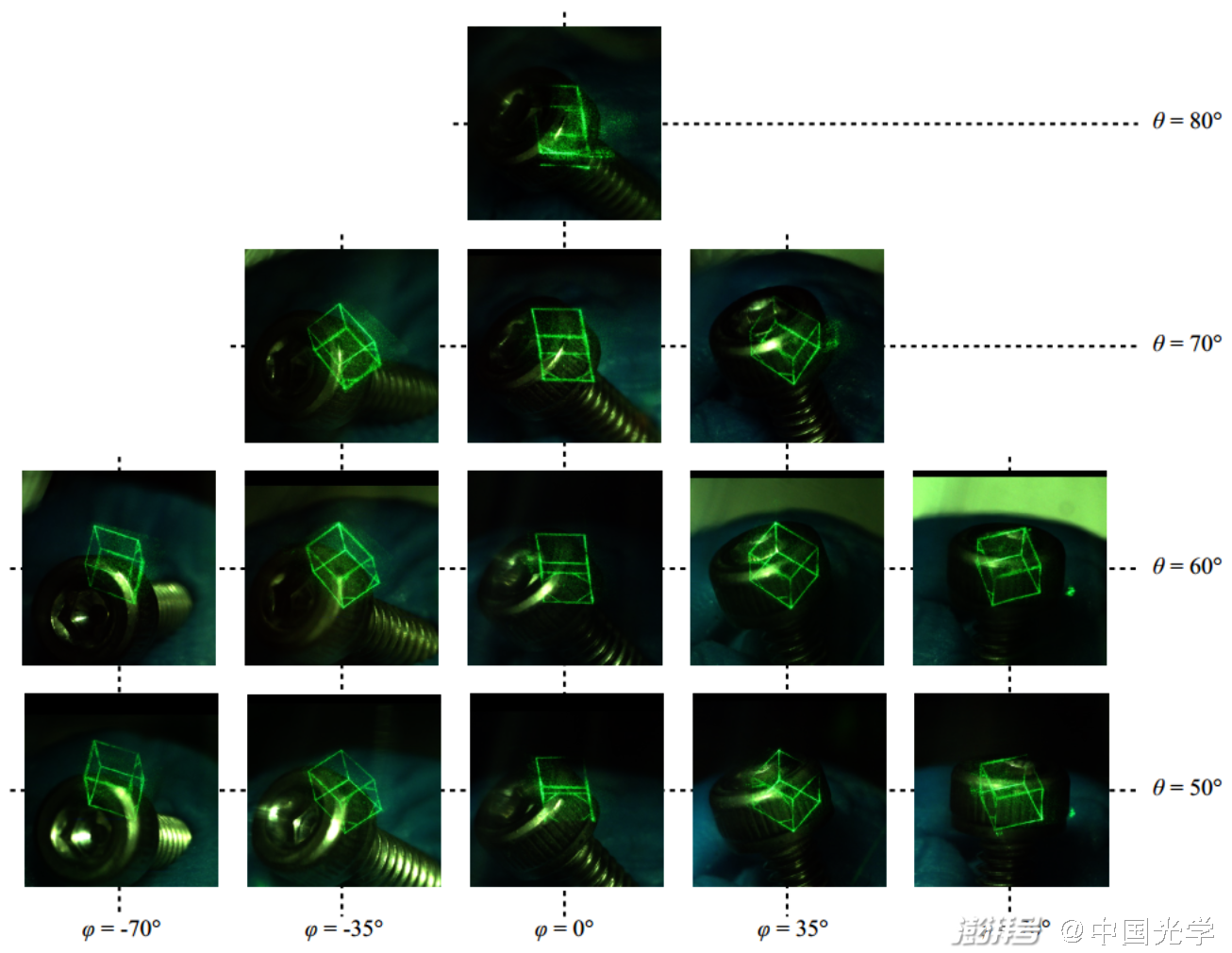
圖5:大視場全息AR顯示效果
在實驗過程中,作者們還發現有些全息再現像發生了形變,畸變程度隨重建位置和觀察方向的不同而不同。他們認為這種畸變是由光學系統的誤差導致的,尤其是錐形 HOE 的光學特性,這種誤差有待進一步評估和修正。
同時,作者們還分析到,雖然他們提出的方法主要優勢在于較大的觀看視角,但是這個視角的最大范圍還是要受到一些因素的限制。
其一是錐形 HOE 記錄過程中使用的物鏡參數,直接決定了 HOE 的最大發散角;
其二是入射波前照射在錐形 HOE 的區域范圍,在圖 3 所示的光學系統中,為了擴大橫向觀看視角,需要縮小計算全息圖的像素間距或者使用大焦距的透鏡。然而,與傳統全息 3D 顯示一樣,再現像尺寸大小和視角大小之間仍存在制約關系,如果使用了大焦距透鏡,就意味著再現像的尺寸被減小了,反之亦然。因此,增大計算全息圖的空間帶寬積是實現大視角和大尺寸的必要條件。在這點上,由于該系統所使用的的都是平面全息圖,在進行多個空間光調制器拼接方面是有優勢的。
此外,由于錐形 HOE 是旋轉對稱結構,水平視角原則上能達到 360°,該系統的水平視角僅有 140° 的原因是由于在透鏡 2 的傅里葉平面上設置了空間濾波器來濾除掉雜散光,這也導致了錐形 HOE 僅有一半的區域被照射。如果利用復振幅編碼來優化全息圖算法,就可以優化掉空間濾波器從而使系統的水平視角達到 360°。
錐形HOE的制作方法
作者們簡單介紹了錐形 HOE 的制作方法,其制備原理如圖 6 所示,利用分束鏡產生兩束相干的平面波,一束作為參考波,另一束通過物鏡形成發散的球面波,兩束光波在空間中發生干涉效應,形成的干涉條紋被記錄在錐形的光致聚合物的薄膜中。
圖6:錐形HOE的制備原理
基于費馬原理的全息圖計算方法
最后,作者們介紹了適用于這種錐形 HOE 的全息圖計算方法,與以往傳統的全息圖算法不同的是,該系統的全息圖的計算過程必須考慮到錐形 HOE 上的反射,因此基于幾何光學中的費馬原理,作者們推導出了新的全息圖計算方法,如下圖 7 所示,其中,重點是計算從物點 S 經過錐形 HOE 上反射點 R 到全息面像素 M 之間的光程。

圖7:基于費馬原理的全息圖計算原理
論文信息
Sando et al. Light: Advanced Manufacturing (2022)3:12
https://doi.org/10.37188/lam.2022.012
轉載 | 先進制造 公眾號
本文編輯 | 趙陽
歡迎課題組投稿——新聞稿
轉載/合作/課題組投稿,微信:447882024
帶您每天讀1篇文獻!加入>Light讀書會
本文為澎湃號作者或機構在澎湃新聞上傳并發布,僅代表該作者或機構觀點,不代表澎湃新聞的觀點或立場,澎湃新聞僅提供信息發布平臺。申請澎湃號請用電腦訪問http://renzheng.thepaper.cn。



- 報料熱線: 021-962866
- 報料郵箱: news@thepaper.cn
互聯網新聞信息服務許可證:31120170006
增值電信業務經營許可證:滬B2-2017116
? 2014-2025 上海東方報業有限公司