- +1
技術派|太空巧手,中國空間機械臂技術領先世界
8月20日14時33分,經過約6小時的出艙活動,神舟十二號航天員乘組密切協同,圓滿完成出艙活動期間全部既定任務。
此次出艙活動,航天員聶海勝、航天員劉伯明出艙,湯洪波在艙內協同配合出艙操作,先后完成了艙外擴展泵組安裝、全景相機D抬升、艙外設施組裝等任務,全過程順利圓滿,進一步檢驗了我國新一代艙外航天服的功能性能,檢驗了航天員與機械臂協同工作的能力及出艙活動相關支持設備的可靠性與安全性。
這次出艙活動有很多震撼的畫面,想必大家對聶海勝和劉伯明互拍的畫面印象深刻,劉伯明幾乎“掛”在空間站上,聶海勝則“站在機械臂上”,背景是藍色的地球,蔚為壯觀。
此次出艙任務,機械臂將航天員從核心艙的前部節點艙接上送到核心艙的后部資源艙進行作業,然后再返回前部節點艙,總的路程較第一次出艙任務要遠很多,任務時間也更長。
航天員出艙活動經常離不開機械臂的支持,而且機械臂在飛行器捕獲等方面也有發揮重要作用,被譽為“太空巧手”。那么,中國空間機械臂的水平如何?

聶海勝則“站在機械臂上”,背景是藍色的地球,蔚為壯觀。
不可或缺的“太空巧手”
隨著人類探索太空腳步的不斷向前邁進,各種各樣的航天飛行器發射進入太空執行任務。在各種空間活動中,諸如空間飛行器的自主交會對接、空間碎片清除、深空探測等,通常需要一種具有精確操作能力和視覺識別能力的空間機構來輔助完成,在這種情況下,空間機械臂技術應運而生。
空間機械臂是一個機、電、熱、控一體化高度集成的空間機電系統,其本身實際上是一個智能機器人。根據安裝位置不同,空間機械臂分為艙內和艙外兩大類,艙內機械臂因為受艙內空間的限制,尺寸和運動范圍都受到了制約,主要的用途是艙內組件的裝配、零部件的更換、對漂浮物體的抓取,空間科學試驗等。艙外機械臂針對不同任務而設計,長度從幾米到十幾米不等,可以輔助空間飛行器完成交會對接、對空間目標的捕獲釋放、在軌服務、空間觀測等任務。
上世紀70年代,美國就開始探索機械臂等機器人系統應用于航天領域,用于替代航天員在惡劣的太空環境中完成在軌組裝、維修和回收空間設備的任務。
世界上第一套空間機械臂系統由加拿大Spar公司于1981年設計研制,名為 Canadarm1,安裝在美國航天飛機上。該機械臂長約15米,重410千克,有6個可控關節,其上安裝有相機系統來觀察機械臂的工作狀態,協助末端執行器完成操作任務。Canadarm1機械臂最大負約30噸,參與了空間飛行器的維護和空間站的組裝等工作。
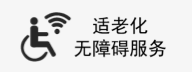
國際空間站上的機械臂。
后面,加拿大又研發了多套空間機械臂,其中,最著名的機械臂就是為國際空間站研制的Canadarm2。該機械臂長17.6米,有7個自由度,總重1.8噸,最大負荷超過116噸,可以自我重定位,具備艙體表面爬行功能(但只能在美國艙段上爬行,因為有些其他國家艙段沒有供機械臂爬行的點位)。這里要提一下的是7個自由度活動能力,這是一種仿生的設計,因為我們人從肩到手就是有7個自由度,非常靈活。
空間站的機械臂可以幫助航天器停靠國際空間站,支持航天員出艙活動,完成太空試驗以及空間站的建設、維護等,加拿大航天局也因此獲得了國際空間站3%的使用權。除了加拿大的機械臂,其實國際空間站還有日本和歐空局的機械臂,但尺寸比加拿大的小,加上日本和歐空局的艙段少,知名度遠小于加拿大的機械臂。歐空局的機械臂(ERA)今年7月隨俄羅斯的“科學”號實驗艙一同升空,該機械臂長11米,重630千克,有7個自由度,也具備艙體表面爬行功能。
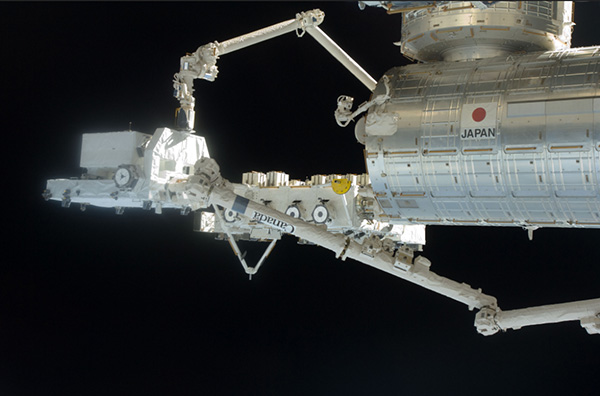
這是一張經典照片,航天員站在國際空間站機械臂上進行出艙活動。
日本很早就開始研制空間機械臂,于1997年成功發射了ETS-7工程試驗衛星,ETS-7由一顆追蹤星和一顆目標星組成,驗證了交會對接和空間機器人技術。其機械臂具有6個自由度,配有攝像機和輔助工具,末端安裝有三指靈巧機器手系統。它首次進行了無人情況下的自主交會對接和艙外空間機器人遙操作試驗,演示了多自由度、多傳感器機械手用于空間精密在軌服務的能力。
寫到這里可能有一些人會問,作為世界上航天科技實力最強的美國怎么沒有研制機械臂,其實,美國在這一領域也處于世界領先水平,只是美國與這些盟國關系很好,有些項目也可以給其他國家做,沒必要大包大攬。美國馬里蘭大學從1992年起開始了“漫游者”空間機械臂的設計與研究,1996年完成了遙控機械臂實驗。2007年,美國國防高級研究計劃局的“軌道快車”項目搭乘宇宙神-5火箭發射升空。衛星裝備了高度自動化的機械臂,在試驗中,機械臂反復地從一顆衛星傳遞部件到另一個衛星上,以驗證其功能、可操作性和可重復性,初步具備了替代航天員在太空完成維修作業的能力。
盡管取得了不錯的成績,加拿大航天局并沒有坐吃老本,后面又開始研制第三代空間機械臂——Canadarm3,其比前一代機械臂更加靈活和緊湊,機械臂長15米,擁有6個自由度和高級軟硬件結構。據悉,Canadarm3將用于美國的“門戶”深空空間站,支持美國“阿爾忒彌斯”載人登月計劃,主要負責航天器的抓取和釋放,支持航天員出艙活動等。

國際空間站的機械臂捕獲“龍”貨運飛船。
世界領先水平的中國機械臂
中國空間站核心艙上的空間站機械臂是我國目前智能程度最高、規模與技術難度最大、系統最復雜的空間智能制造系統。
中國載人航天工程總設計師周建平此前介紹稱,機械臂的作用在于空間站組裝建造、維護維修、輔助航天員出艙活動等任務,“是中國空間站在軌建造能力水平的重要標志”。
根據官方公布的信息,該機械臂平時安裝在核心艙的小柱段上,主體結構是兩根臂桿,展開長度10.2米,重約700千克,其肩部設置了3個關節、肘部設置了1個關節、腕部設置了3個關節,每個關節對應1個自由度,具有7個自由度。通過各個關節的旋轉,空間站核心艙機械臂能夠實現自身前后左右任意角度與位置的抓取和操作,為航天員順利開展出艙任務提供強有力的保證。

珠海航展上展示的核心艙和機械臂。
為擴大任務觸及范圍,該機械臂還具備爬行功能。由于核心艙機械臂采用了“肩3+肘1+腕3”的關節配置方案,肩部和腕部關節配置相同,意味著機械臂兩端活動功能是一樣的。機械臂通過末端執行器與目標適配器對接與分離,同時配合各關節的聯合運動,從而實現在艙體上的爬行轉移。
除了支持航天員出艙活動外,機械臂在后續任務中還將承擔艙段轉位、懸停飛行器捕獲和輔助對接、艙外貨物搬運、空間環境試驗平臺照料等重要任務。該機械臂還可以從10米擴展到15米,把小臂和大臂組合在一起,形成一個更長的組合臂。機械臂設計壽命15年、負載能力25噸、末端定位精度45毫米,可實現大范圍、大負載操作以及局部精細化操作。此外,機械臂以后還可以擴展到實驗艙Ⅰ、實驗艙Ⅱ,還有光學艙,這些艙都可以進行艙外機械臂支持航天員開展的一些作業。
橫向對比世界其他國家機械臂,中國空間站機械臂操控精度、負載自重比和擴展性等指標均已達到世界領先水平,而且值得一提的是全部核心部件實現了國產化。



- 報料熱線: 021-962866
- 報料郵箱: news@thepaper.cn
互聯網新聞信息服務許可證:31120170006
增值電信業務經營許可證:滬B2-2017116
? 2014-2025 上海東方報業有限公司